
Research Statement
Motion Planning of UAVs
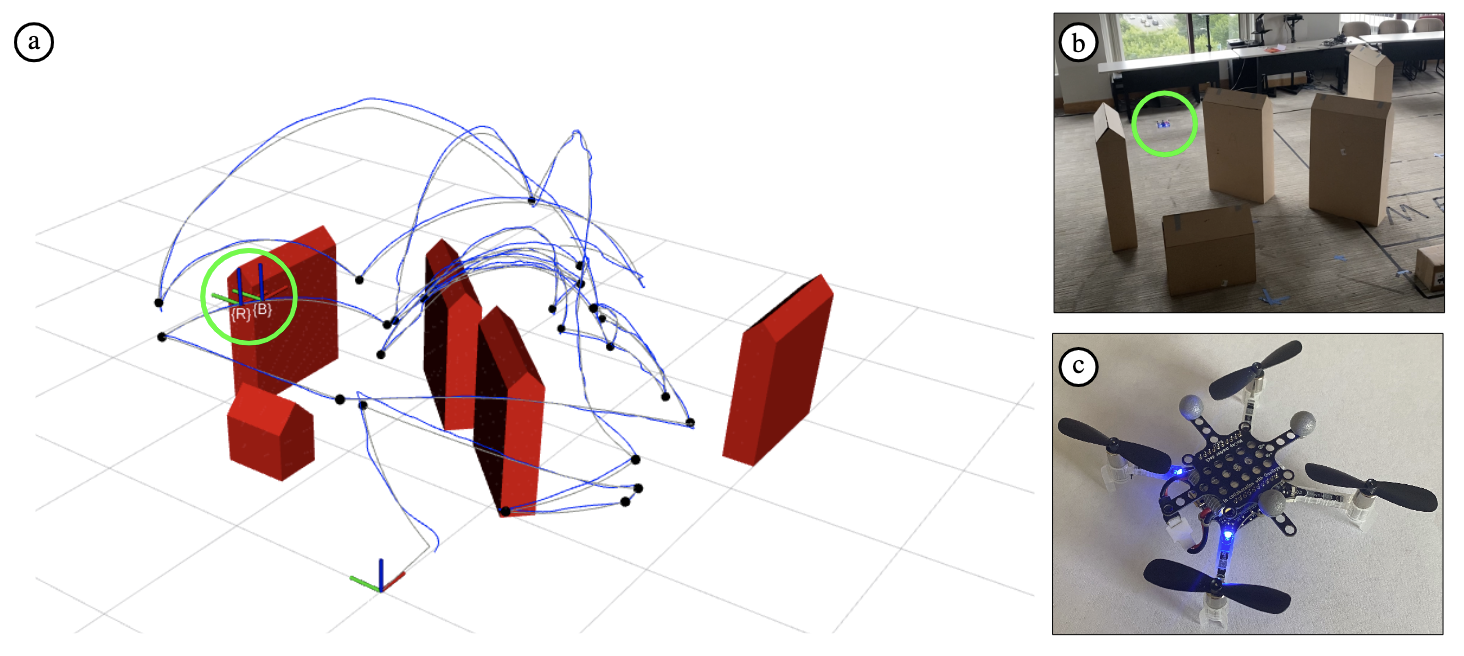
A fundamental aspect of motion planning (MP) is that the robot must not only reach its goal but also satisfy a set of constraints at all times in the presence of modeling errors and disturbances. The constraints may include avoiding obstacles, ensuring actuator bounds and other limits on the robot state. An appealing approach is Model Predictive Control, where optimal control problems are solved in a receding horizon fashion. The main advantage of such optimization-based...
Minimalistic Robotic Swarm
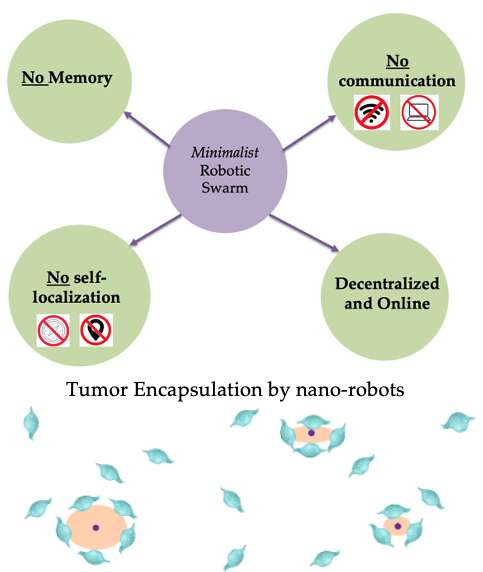
A central question guiding this reserach is: Can a team of robots achieve complex tasks, with basic sensors and decentralized decision-making, rather than relying on a handful of expensive robots with advanced sensors? We address this by co-designing onboard hardware and control algorithm for multi-agent systems. The unique aspect of our work is the emphasis on task completion while utilizing minimal available information and working within the constraints of limited onboard resources. Our approach raises...
Locmotion of a Origami Robot
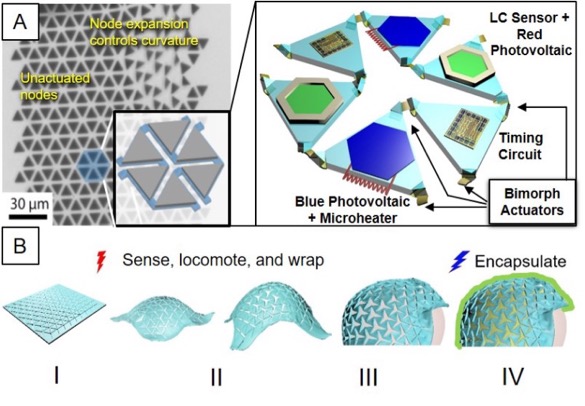
A fundamental problem with robotics at the microscale, is how to design robots that can be manufactured in 2D and yet are able to locomote and adopt arbitrary shapes. Auxetic mechanical metamaterials comprised of rigid panels that can locally splay, are an interesting solution to this problem because they can yield reconfigurable curved surfaces and generate different locomotion gaits for robotics applications. In this work we have developed electrically programmable, micrometer-sized metamaterial-based robots (MetaBots) that...
Task and Motion Planner for Robot Manipulation
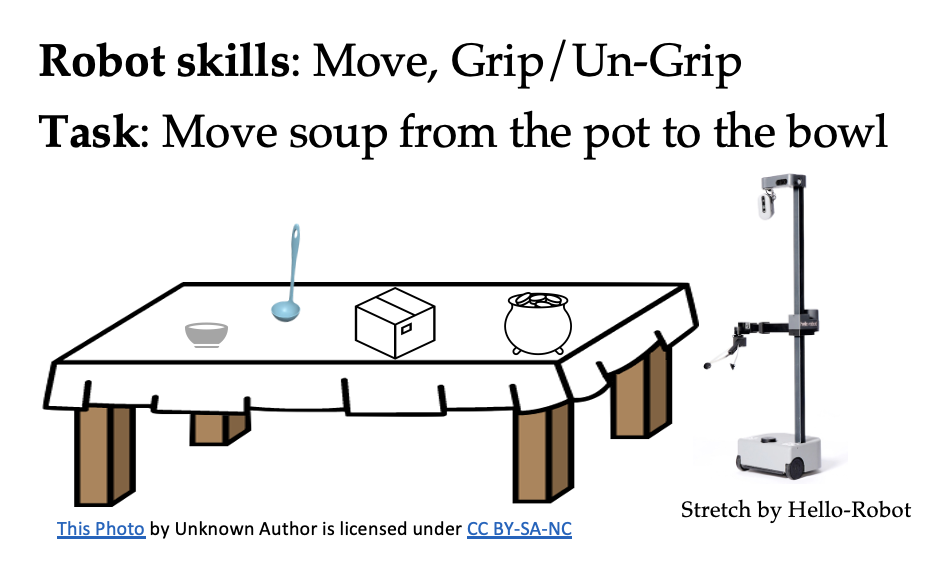
Planning in robotics is traditionally divided into two: low-level, that deal with voltages to motors, obstacle avoidance and dynamically constrained trajectories; and high-level, which work with symbolic representations of actions and results. In this work, we present a systems approach to Task and Motion Planning (TAMP) that uses the affordances of the objects in the environment to produce physically feasible plans to perform the desired task. Affordances are defined as the possibility of an action...
Consensus under sensor bias
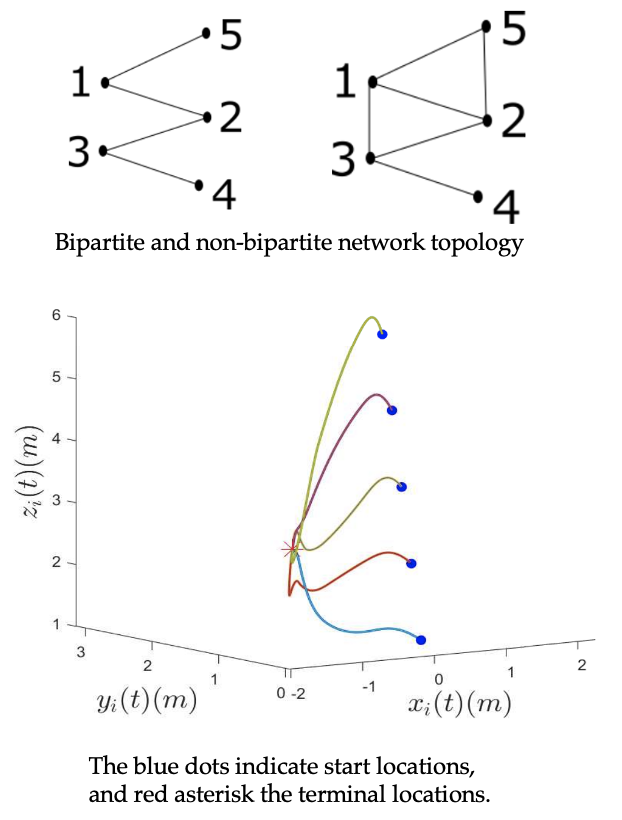
While adaptive control algorithms for disturbances and stochastic errors with upper bounds have been extensively studied, we delve into uncharted territory—consensus amidst measurement errors with unknown bounds. Traditional strategies for handling disturbances fall short in the face of measurement errors, as these errors scale with control gain, unlike external disturbances. We develop an adaptive distributed control law using Lyapunov methods for consensus of networked double integrator systems [Paper]. The agents measure relative positions over a...
Real-time Algorithm for In Flight IMU Alignment
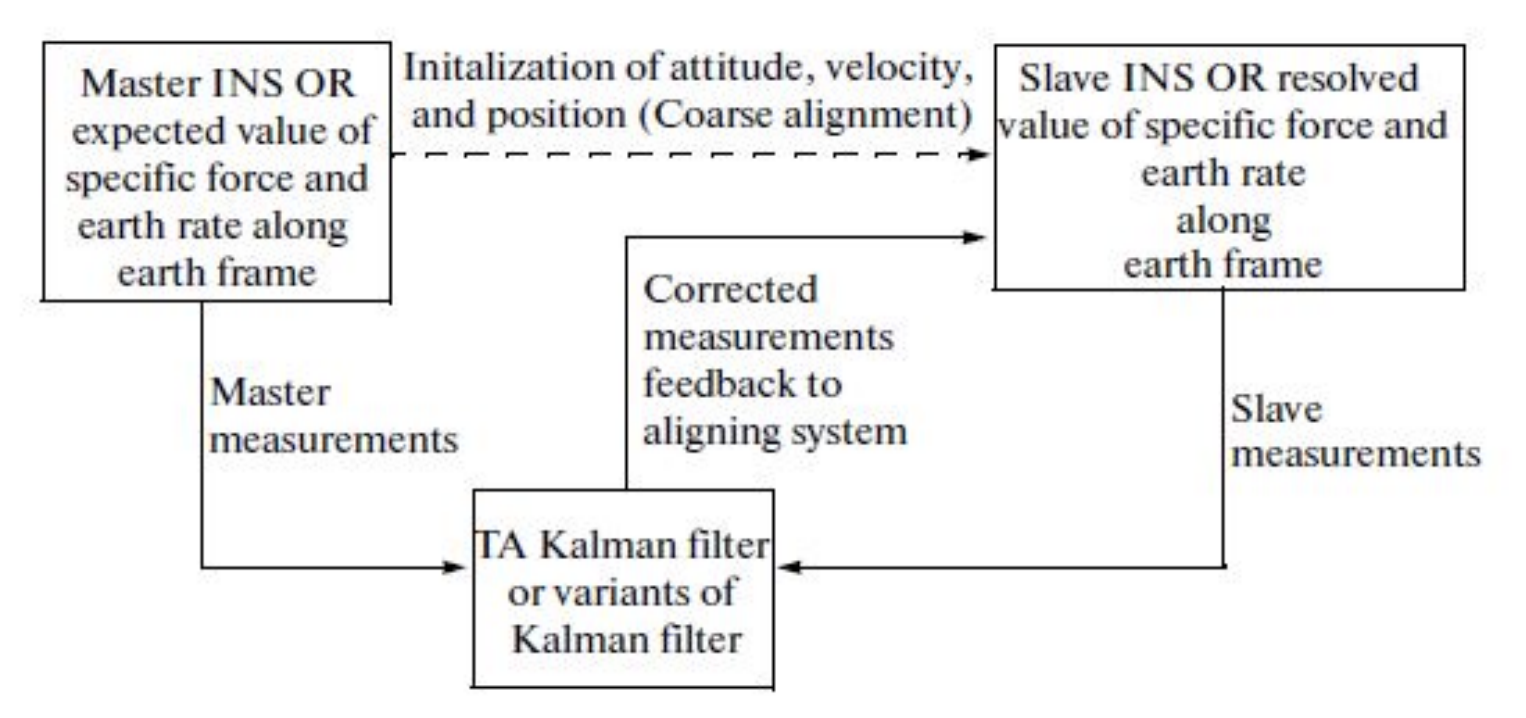
Stores are required to be dropped from a variety of flight vehicles, from airplanes to parachutes. Modern stores are ‘guided— they carry an Inertial Measurement Unit (IMU), which provides estimates of the store states (position, velocity, angular rates and attitude) in flight. This information usually suffers from error, e.g., due to noise, drift, etc. The standard way to filter out the noise is to use a Kalman filter. When preparing to launch the store from...
Autonomous Navigation for Spacecraft Rendezvous
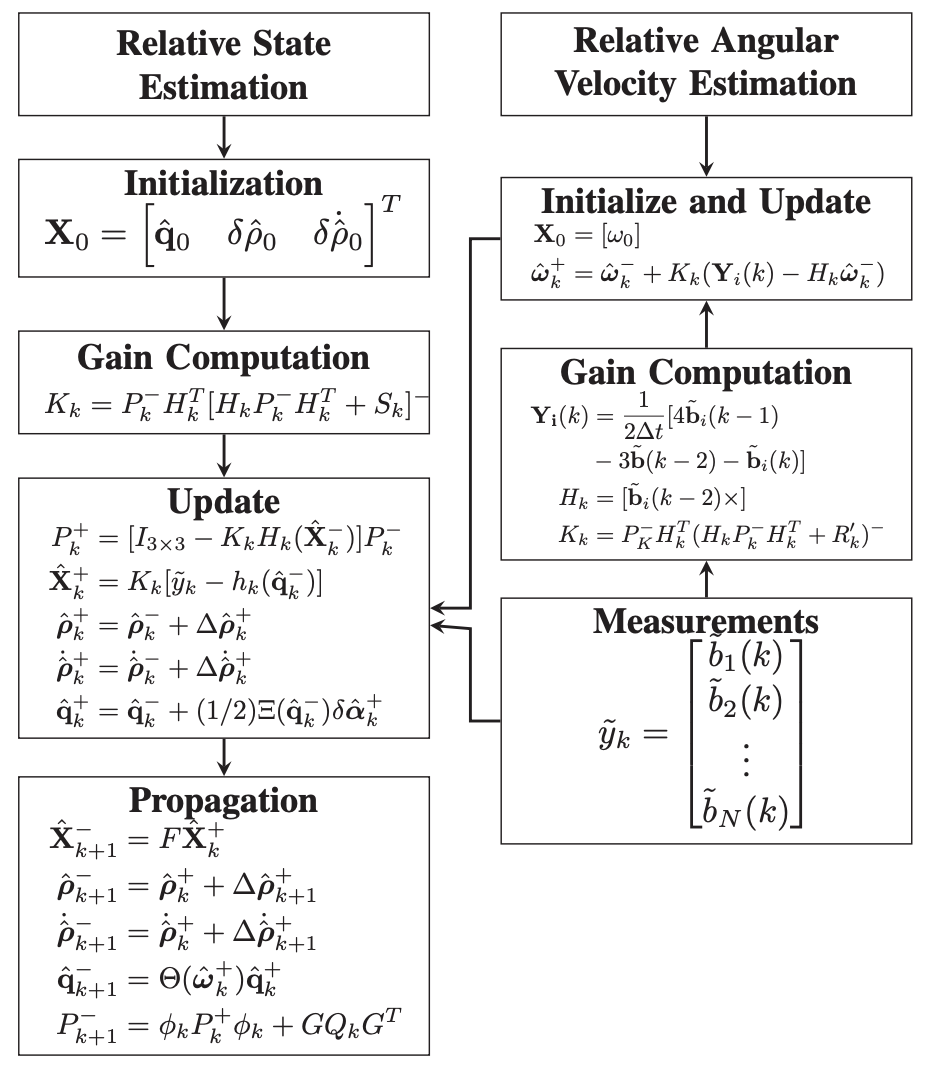
In this work, I developed a novel algorithm to use line of sight (LOS) measurements for relative position, attitude and angular rate estimation for autonomous spacecraft navigation. Traditional relative attitude navigation is based on gyro measurements from the spacecraft in formation for estimating angular rates. But it requires information exchange between the two spacecrafts and continuous availability of gyro data. The loss of gyro data can result in high propagation errors. The approach presented in...
Modeling of Jet Propulsion System
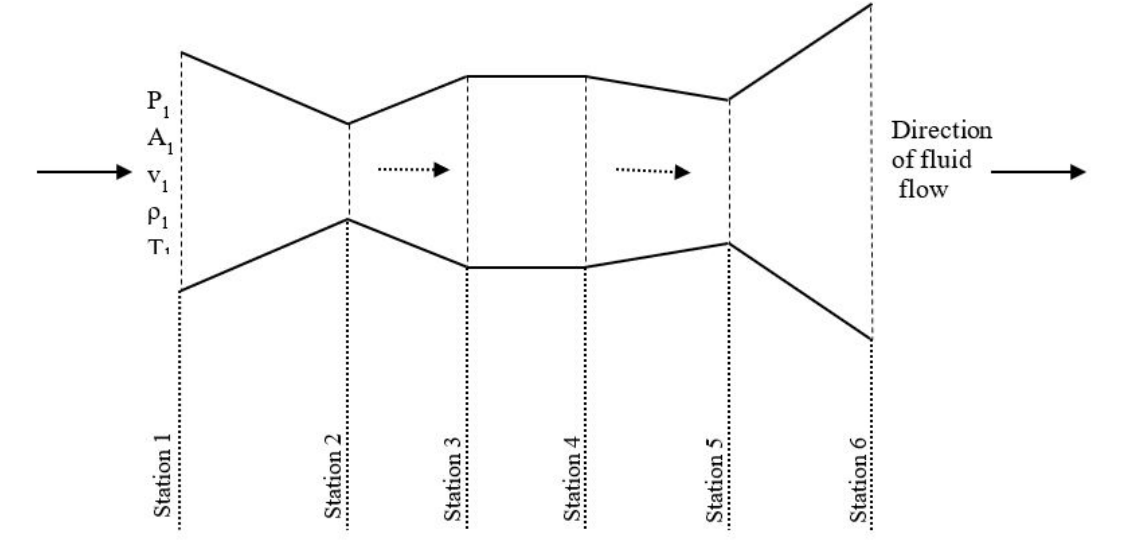
In this project I have developed a physical model of jet engine from first principles to formulate jet propulsion concepts and performance parameters, with the engine geometry as center of interest and not the fluid exchanged as in the conventional approach. The engine thrust is re-defined as the surface integral of pressure forces exerted by the fluid on the surface of the jet engine. Similarly the propulsive efficiency is re-defined as the efficiency with which...