
Minimalistic Robotic Swarm
Link to Report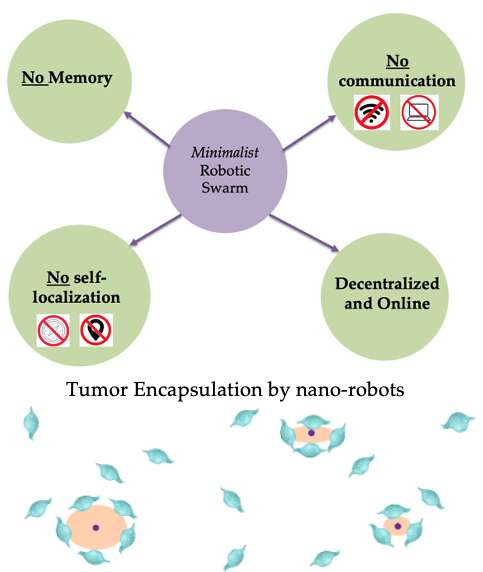
A central question guiding this reserach is: Can a team of robots achieve complex tasks, with basic sensors and decentralized decision-making, rather than relying on a handful of expensive robots with advanced sensors? We address this by co-designing onboard hardware and control algorithm for multi-agent systems. The unique aspect of our work is the emphasis on task completion while utilizing minimal available information and working within the constraints of limited onboard resources.
Our approach raises intriguing research questions: What quantifiable trade-offs exist when considering hardware capabilities and algorithm complexity? Can we create a comprehensive framework for exploring the design space, accommodating various hardware capabilities? How can this framework facilitate task execution with agents possessing diverse computing and sensory capacities? Can collective intelligence algorithms adapt to individual agents' hardware limitations and capabilities, dynamically adjusting their behavior based on task requirements, computing power, or sensory capabilities? This research direction fundamentally reshapes our approach to multi-agent robotic systems, enabling them to operate effectively in resource-constrained environments while harnessing the full potential of diverse hardware capabilities across the robot team.
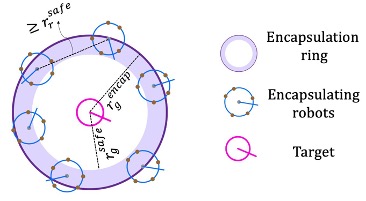
We develop a decentralized control algorithm for a robotic swarm given the task of encapsulating static and moving targets in a bounded unknown environment. Focusing on guarantees and minimalism, we tackle the challenge of target searching and pursuit evasion in dynamic, unknown environments. By leveraging Lyapunov stability theory and problem-specific geometric constraints, we develop correct-by-construction controllers that rely solely on a robot's simple noisy sensors to construct an impression of its surroundings. This approach reduces the reliance on accurate localization, memory usage, or communication hardware.
Notably, our work has produced several bounds on task and system design parameters. These include quantifying trade-offs such as the relationship between the number of sensors on a robot and the number of robots required to capture a target. We also provide guarantees for encapsulating faster evaders in a minimalist swarm where each agent lacks knowledge of the evader's motion, challenging a strong assumption typically required in pursuit-evasion literature.