
Locmotion of a Origami Robot
Link to Report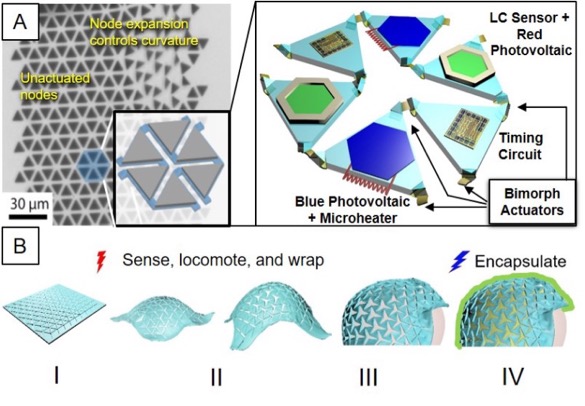
A fundamental problem with robotics at the microscale, is how to design robots that can be manufactured in 2D and yet are able to locomote and adopt arbitrary shapes. Auxetic mechanical metamaterials comprised of rigid panels that can locally splay, are an interesting solution to this problem because they can yield reconfigurable curved surfaces and generate different locomotion gaits for robotics applications.
In this work we have developed electrically programmable, micrometer-sized metamaterial-based robots (MetaBots) that could form 3D surfaces from two-dimensional patterns, cycle among different shapes, and locomote in a biocompatible solvent. These MetaBots have a hierarchical structure: the repeating panels are linked by origami-based splay hinges, which are controlled by applying voltage to atomically thin surface electrochemical actuators. When we apply a voltage, the local expansions of the unit cells alter the local Gaussian curvature of the MetaBot, allowing it to reconfigure into a 3D surface.
By locally actuating different subsets of the splay hinges, we can transform the MetaBot into a rich class of 3D shapes that we characterize using confocal fluorescence microscopy. Furthermore, by applying a phase delay between actuating the different hinge subsets, we break both the spatial and temporal symmetry, and drive the MetaBots to locomote in a biocompatible solution.
To support this research, I have developed a physics-based simulator in the Unity game engine for control synthesis and devised a heuristic optimization-based inverse design algorithm to select the optimal actuation of splay hinges, leading to desired locomotion. We then show experimentally that we are able to generate a variety of 3D shapes by actuating a subset of the hinges.
The next step is to make MetaBots fully autonomous by integrating biosensors, photovoltaics, and simple computation circuits. This advancement will open up applications such as microscopic robots with distributed control, tunable optical metasurfaces, and medical micro-robotics.